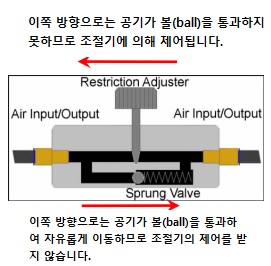
Understanding Flow Controls: Meter-In vs Meter-Out 에어실린더에 작용하는 힘은 압력조절기(pressure regulator)에 의해 결정됩니다. 그리고 피스톤이 움직이는 속도는 속도제어(flow control) 밸브를 통해 이루어집니다. 실린더의 각 포트마다 속도제어 밸브가 설치되어 인출과 인입 속도를 제어하게 됩니다. 아래는 속도제어 밸브의 구조입니다. 위 그림에 대한 기호는 아래와 같이 표기됩니다. 미터아웃(Meter-Out) 방식의 실린더 속도제어 아래 그림은 미터아웃 방식에 대한 도식입니다. 미터인(Meter-In) 방식의 실린더 속도제어 아래 그림은 미터인 방식에 대한 도식입니다. 끝.
전력(kW) 계산하기 (직류, 교류 단상, 교류 삼상) 전류(A)와 전압(V)를 알고 있는 경우, 전압원이 종류에 따라 전력(kW)을 어떻게 계산하는지 보겠습니다. DC amps to kilowatts calculation (직류) 직류는 단순히 전류와 전압을 곱하고 1000으로 나누면 kW 단위의 전력을 구할 수 있습니다. P (kW) = I (A) × V (V) / 1000 AC single phase amps to kilowatts calculation (교류 단상) 교류 단상의 경우 역률(Power Factor)를 곱한 뒤, 전류와 RMS 전압을 곱하고, 1000으로 나누면 kW 단위의 전력을 구할 수 있습니다. P (kW) = PF × I (A) × V (V) / 1000 AC three phase amps to kilowatts calculation (교류 삼상) Calculation with line to line voltage (상간 전압 이용시) 교류 삼상의 상간 전압을 이용하여 전력을 구하는 경우, √3과 역률(Power Factor)을 곱하고, 위상 전류(phase current)와 두 활선 사이의 RMS 전압을 곱합니다. 그리고 1000으로 나누어 kW 단위의 전력을 구합니다. P (kW) = √3 × PF × I (A) × V L-L(V) / 1000 Calculation with line to neutral voltage (활선-중립선 이용시) 교류 삼상의 활선-중립선 전압을 이용하여 전력을 구하는 경우, 3과 역률(Power Factor)을 곱하고, 위상 전류(phase current)와 두 활선 사이의 RMS 전압을 곱합니다. 그리고 1000으로 나누어 kW 단위의 전력을 구합니다. P (kW) = 3 × PF × I (A) × V L-N(V) / 1000 끝.
AWG는 American Wire Gauge의 약자로써 미국에서 사용되는 전선관련 규격입니다. 조작선으로 많이 사용되는 UL선의 경우 AWG 사이즈가 표기되어 있는데 해당 전선의 도체 단면적이 몇 SQ(\(mm^{2}\))인지 궁금할 때가 있습니다. AWG 번호를 가지고 해당 전선의 도체 단면적이 몇 SQ(\(mm^{2}\))인지 변환하는 방법과 변환표를 공유하고자 합니다. AWG => SQ 변환공식 우선 n은 AWG 번호를 의미합니다. 전선의 피복을 포함한 외경 지름은 아래와 같이 구할 수 있습니다. The metric wire outside diameter = \(0.127\ mm\ \times\ 92^{(32-n)/39}\ [mm]\) 전선내 도체의 단면적은 아래와 같이 구할 수 있습니다. The metric wire cross-section = \(0.012668\ mm^{2}\ \times\ 92^{(36-n)/19.5}\ [mm^{2}]\) 예를 들어, 1AWG의 전선에 대해 위 공식을 적용하면 아래와 같습니다. The metric wire outside diameter = \(0.127\ mm\ \times\ 92^{(32-1)/39}\ =\ 7.348 mm\) The metric wire cross-section = \(0.012668\ mm^{2}\ \times\ 92^{(36-1)/19.5}\ = 42.409 mm^{2}\) AWG => SQ 변환표 끝.
📊 ETF 투자 가이드 : 카테고리별 ETF 선택 전략 **ETF(상장지수펀드)**는 단일 상품이 아니라, 다양한 자산군과 전략으로 구성된 포트폴리오입니다. 그래서 ETF에 투자하려면 무엇에 투자하고 있는가 를 파악하는 것이 핵심입니다. 이번 글에서는 ETF를 자산군별로 나누어, 어떤 종류의 ETF가 있는지 , 그리고 각 카테고리별 특징과 전략은 무엇인지 를 국내 투자자의 입장에서 살펴봅니다. 🇺🇸 1. 미국 주식 ETF – ETF의 중심축 국내 ETF 시장에서 미국 주식 ETF 는 이미 많은 투자자들에게 친숙한 선택입니다. TIGER 미국S&P500, KODEX 미국나스닥100 등도 모두 미국 주식 기반 ETF죠. 이 카테고리는 다음과 같이 구분됩니다: 전체 시장형 (Total Market) : 미국 전체 기업을 추종하는 ETF (예: VTI) 스타일형 (Growth vs. Value) : 성장주 중심 or 가치주 중심 규모별 ETF : 대형주, 중형주, 소형주에 따라 나뉨 (예: Russell 1000, 2000 기반) 📌 국내 투자 팁 : 환율 영향을 고려해 환헤지형 과 비헤지형 을 구분해서 선택하세요. 🌍 2. 해외(국제) 주식 ETF – 글로벌 분산투자의 시작 미국 외 선진국·신흥국 주식 ETF 도 다양합니다. 예를 들어: 선진국 중심 : 유럽, 일본, 호주 등 (예: MSCI EAFE) 신흥국 중심 : 중국, 인도, 브라질 등 (예: MSCI Emerging Markets) 최근에는 국내 ETF 들도 해외지수를 추종하며 글로벌 시장에 쉽게 투자할 수 있도록 돕고 있습니다. (예: KODEX 선진국MSCI World) 📌 국내 투자 팁 : 신흥국 ETF는 변동성이 크기 때문에, 비중 조절이 중요합니다. 🏭 3. 산업 섹터 ETF – 특정 산업에 집중 투자 미국뿐 아니라 한국에서도 산업별 ETF 가 점차 다양해지고 있습니다. 미국 섹터 ETF : 반도체, 클...
위 그림에서 (a)는 전압분배(Voltage Divider), (b)는 가변저항(Potential Divider)입니다. 전압분배는 고정된 두개의 저항으로 구성됩니다. 가변저항은 전압분배와 구조적으로 비슷하나 하나의 저항을 특정 지점을 기준으로 둘로 나누게 되며, 이 특정 지점은 임의로 조절 가능한 구조로 되어 있습니다. 위 그림에서 전압분배나 가변저항 모두 두 저항 사이에 Vd 포인트가 위치하고, 저항 R1, R2 크기를 조절할 수 있느냐 없느냐가 차이점입니다. 전압분배와 가변저항 둘 모두, 직렬로 연결된 두 저항의 크기에 따라 인가되는 공급 전압이 달라지는 원리를 이용하며, 공급전원을 원하는 크기로 출력하기 위해서 사용합니다. 아래 그림은 동일한 저항값을 가지는 R1, R2가 직렬로 연결되어 있는 회로입니다. Vin은 총 전압이고, R1, R2에 나누어 인가됩니다. 결론적으로 Vout은 Vin과 다른 전압을 가지게 됩니다. 각 저항 R1, R2에 얼마의 전압이 인가될지는 두 저항의 상대적인 크기와 총 저항의 크기로 결정됩니다. 그 공식은 아래와 같습니다. 아래 회로를 봅시다. Vin이 5V이고 R1 is 1KΩ and R2 is 10KΩ인 경우 Vout에 인가되는 전압은 얼마일까요? 가변저항은 다양한 저항값을 가진 제품들이 있습니다. 예를 들어 10KΩ 가변저항의 경우 0Ω에서 최대 10KΩ까지 저항값을 변경할 수 있습니다. 그럼 아두이노와 가변저항을 이용하여 LED의 밝기를 조절해 보겠습니다. 우선 가변저항은 아래와 같은 구조를 가집니다. 3개의 핀으로 구성되어 있고, Vref-Ground 핀을 통해서 공급전원을 인가하면 ouput 쪽으로 가변저항에 의해 조정된 출력전압이 인가됩니다. 우선, 아두이노 우노와 220옴 저항, LED를 이용하여 위와 같은 회로를 구성합니다. 그리고 아두이노 IDE를 이용하여 아래와 같이 코드를 입력합니다. const int ledPin = 9; //pin 9의 PWM 기능을 이용합니다. ...
[전기실무] 부하 특성 데이터와 KEC 차단기 선정 가이드 전기 설비 설계 시 부하의 정격 전류만 확인하면 예기치 못한 차단기 트립이나 선로 과열이 발생할 수 있습니다. 슈나이더 일렉트릭의 기술 가이드에 명시된 부하별 상세 특성과 **한국전기설비규정(KEC)**에 따른 차단기 선정 핵심을 정리해 드립니다. 1. 주요 부하별 상세 특성 (실무 기술 데이터) 설계 시 차단기가 오동작하지 않도록 부하별 기동(돌입) 전류 배수를 반드시 확인해야 합니다. 유도 전동기 (Motor) 기동 전류는 정격의 약 6 ~ 8배 이며, 피크 시 최대 12 ~ 15배 까지 발생합니다. 스타-델타 기동 등을 통해 기동 전류를 낮출 수 있습니다 (예: 7.5배 → 4배로 감소). 변압기 (Transformer) 전원 투입 시 정격의 약 25배 에 달하는 매우 높은 돌입 전류가 순간적으로 흐릅니다. LED 조명 점등 시 정격의 수십 배에서 최대 250배 이상의 돌입 전류가 아주 짧은 시간(250μs 미만) 동안 발생합니다. 방전등 (HID / 형광등) 램프 전력 외에 **안정기 손실(약 10 ~ 25%)**을 부하 합계에 반드시 포함해야 합니다. 역률 개선 콘덴서가 없는 형광등의 역률은 약 0.6으로 매우 낮습니다. 적외선 램프 및 저항 부하 일반 히터는 역률이 1에 가깝지만, 적외선 램프는 초기 투입 시 냉간 저항 특성으로 정격의 10 ~ 15배 전류가 흐를 수 있습니다. 2. KEC 기준 차단기 선정 공식 KEC 212.4.1에 따라 과부하 보호장치(차단기)는 다음 조건을 만족해야 합니다. [조건 1] 기본 선정 부등식 차단기 정격전류( In )는 설계전류( Ib )보다 크고 전선의 허용전류( Iz )보다 작아야 합니다. Ib ≤ In ≤ Iz 설계 전류 (Ib) 계산식: 3상 부하: Ib = Pn / (1.732 × V × 효율 × 역률) 단상 부하: Ib = Pn / (V × 효율 × 역률) [조건 2] 규약 동작 전류 검토 차단기가 전선의 절연이 파괴되기 전에 확실히 동작...
Frame Grabber? 프레임 그래버는 비디오 카메라를 컴퓨터에 연결하기 위한 컴퓨터 확장보드를 일컫는 일반적인 이름입니다. 이 이름은 이미지 프레임을 생성하는 에어리어 스캔 카메라에 적합합니다. 라인 스캔 카메라가 관련되면 프레임 대신 라인이 생성됩니다. 그럼에도 불구하고 인터페이스 보드는 여전히 일반적으로 프레임 그래버라고 불립니다. 프레임 그래버는 내부 저장 구조에 따라 여러 종류로 분류될 수 있습니다. 일반적인 두가지 종류는 아래와 같습니다. - 프레임 버퍼 기반 프레임 그래버 (Frame buffer-based frame grabbers) - FIFO 기반 프레임 그래버 (FIFO-based frame grabbers) What is a Grabber? 그래버는 프레임 그래버가 소유한 하드웨어 리소스 세트입니다. 프레임 그래버는 동시에 작동하는 여러 그래버를 통합할 수 있습니다. 이로 인해 단일 보드 내에 여러 개의 카메라와 연동될 수 있습니다. 여러 그래버를 동시에 작동할 수 없는 경우에도 여러 대의 카메라를 처리할 수 있습니다. 이 경우, 그래버(또는 그래버 세트)는 시간 다중화 방식으로 사용됩니다. 이것을 "그래버 스위칭"이라고 합니다. 그래버는 각 카메라에 연속적으로 할당되어 카메라를 제어하고 비디오 프레임이나 페이지를 획득합니다. 프레임 버퍼 기반 그래버는 프레임이나 페이지를 온보드 프레임 버퍼에 저장한 다음 호스트 메모리에 저장합니다. FIFO 기반 그래버는 프레임이나 페이지를 호스트 메모리에 직접 저장합니다. Frame Buffer-Based Frame Grabber 그래버는 카메라에 필요한 모든 타이밍 및 제어 작업을 담당하고 카메라에서 제공하는 비디오 데이터(아날로그 또는 디지털)를 조절하는 하드웨어 리소스 세트입니다. 프레임 버퍼는 카메라에서 생성된 풀 프레임 이미지를 저장할 수 있을 만큼 큰 내부 저장 영역입니다. Line-Scan 작업의 경우 프레임은 실제로 연속된 라인 집합으로 구성되며 이 집합을 페이지라고...
역사 (History) 최초의 PLC는 1968년도 제너럴 모터스 회사에 의해 설계되었습니다. PLC 등장 이전에는 아래 그림과 같은 전기기계식 릴레이 (Electromechanical Relay)로 제어 시스템을 구축했습니다. 전기기계식 릴레이로 구성된 시스템을 수정하기 위해서는 릴레이의 물리적 배치 및 배선 재작업으로 인한 비용 및 시간의 낭비를 초래하였습니다. 제너럴 모터스는 이러한 비용 낭비를 줄이는 한 방법으로 PLC를 설계하게 된 것입니다. 이 때 사용된 반도체는 IC (Integrated Circuit) 형태이지만, 1971년도 인텔 (Intel)이 마이크로프로세서를 소개한 이 후 PLC도 덩달아 발전을 거듭하게 됩니다. 제어의 형태 생산 공정들은 선행 공정이 있기 마련입니다. 즉, 한 공정이 끝난 뒤 그 다음 공정이 이어지는 형태입니다. 각 공정에는 세부 공정들이 있으며 여러 가지 장비의 ON/OFF 동작에 의해 작업됩니다. 이러한 장비들을 언제 ON/OFF 할 지 결정할 지는 센서의 ON/OFF와 같은 이산적 정보 (discrete information)를 바탕으로 이루어집니다. 또는 온도, 습도, 압력 등과 같은 연속적으로 변화하는 정보를 활용할 수도 있습니다. 시퀀스 제어 (Sequential Control) 시퀀스 제어란 일련의 액션들이 사전에 정의된 순서데로만 동작하게끔 제어하는 형태를 의미합니다. 이러한 제어를 다른 용어로 이산 제어 (Discrete Control)이라고 하며, 이 때 제어 로직의 데이터로 사용되는 입출력 또한 ON/OFF 형태입니다. (예를 들어, 센서가 무엇을 검출/미검출, 모터가 ON/OFF 등을 의미) 자동 제어 (Automatic Control) 자동 제어란 연속적으로 변화하는 입력정보를 바탕으로 일련의 제어 로직을 거친 뒤 출력값을 연속적으로 변화시키는 형태의 제어를 의미하며 아날로그 피드백 (Analog Feedback Control)이 사용됩니다. 아날로그 피드백에 관여하는 파라미터를...
수학의 발전 과정에서 유클리드 기하학은 오랜 기간 절대적인 체계로 여겨졌지만, 이후 비-유클리드 기하학이 등장하면서 새로운 기하학적 패러다임이 형성되었습니다. 또한, 20세기에 이르러 수학을 엄격한 논리적 체계로 정리하려는 형식주의(Formalism) 가 등장하면서 공리적 접근 방식이 강화되었습니다. 이번 글에서는 이 세 가지 개념을 비교하고, 이를 이해하는 데 도움이 되는 책을 소개해 보겠습니다. 1. 유클리드 기하학(Euclidean Geometry) 개요 유클리드 기하학은 기원전 300년경 그리스 수학자 유클리드(Euclid) 가 저술한 《Elements(원론)》에서 정립된 기하학 체계입니다. 이 체계는 다섯 가지 공리를 기반으로 전개되며, 직관적이고 현실 세계와 잘 맞아떨어지는 기하학으로 여겨졌습니다. 주요 개념 점, 선, 면의 개념 평행선 공준: "한 직선 밖의 한 점을 지나면서 그 직선과 평행한 직선은 단 하나 존재한다." 삼각형의 내각의 합은 180도 피타고라스 정리와 같은 다양한 정리들이 도출됨 유클리드 기하학은 오랫동안 수학과 물리학의 기본 토대가 되었으나, 19세기 이후 그 절대성이 도전받기 시작했습니다. 2. 비-유클리드 기하학(Non-Euclidean Geometry) 개요 유클리드 기하학의 평행선 공준 (5번째 공리)을 제거하거나 대체하면 다른 형태의 기하학이 만들어질 수 있습니다. 19세기에 로바쳅스키(Nikolai Lobachevsky) , 리만(Bernhard Riemann) 등이 각각 쌍곡기하학 과 타원기하학 을 발전시키면서 비-유클리드 기하학이 등장했습니다. 주요 유형 쌍곡기하학(Hyperbolic Geometry) - 로바쳅스키, 가우스, 보야이 한 직선 밖의 한 점에서 평행한 직선이 무수히 많이 존재 삼각형 내각의 합이 180도보다 작음 포앙카레 원판 모델 등으로 시각화 가능 타원기하학(Elliptic Geometry) - 리...
Relay: Power Relay vs General-Purpose Relay 릴레이는 크게 두 부분으로 구성됩니다. 주접점과 보조접점으로 구성된 파트와 이 점접들을 움직이게 하는 코일과 코어로 구성된 전자석 + 복귀 스프링 파트입니다. 코일(coil)이 감긴 코어(core)에 전류를 흘리면 자석이 되어 접점을 코일쪽으로 당기게 되고, 떨어져 있던 두 접점(electric contact)이 붙게 되면서 부하(load)쪽에 전류가 흐르게 됩니다. 보조회로(auxiliary circuit)과 전력회로(power circuit)은 물리적으로 분리되어 있기 때문에 전기적으로 서로 간섭하지 않습니다. 결과적으로 보조회로에 전류를 흘리고 차단함으로써, 전력회로에 연결되어 있는 부하(load)를 ON-OFF할 수 있게 되는 것입니다. 보조회로는 상대적으로 매우 작은, 수 mA 정도의 전류로 구동됩니다. 보조회로와 대조적으로 전력회로에는 매우 큰 전류가 흐를수 있습니다. 감당할 전류의 양이 클수록 릴레이의 크기 또한 커지게 됩니다. 보조회로로 전자석을 구동시킬 때 전압강하(voltage drop)가 일어납니다. 전압강하는 전선의 길이가 길어질수록 커지고, 전선의 두께가 클수록 작아집니다. 보조회로에 적정한 전압이 인가되도록 전선의 길이와 두께에 유의해야 합니다. 보조회로는 교류 외에도 직류로 구동 가능한 모델도 있습니다. 코일이 소모하는 에너지는 릴레이의 크기에 비례하여 커지며, 대개는 몇 Watt 수준입니다. 코일이 구동되면서 내부 접점이 붙기 위해서는 기계적인 움직임이 필요하고, 이로 인해 부하쪽으로 통전되기까지 10-50 msec 수준의 지연이 발생합니다. 이와 같이 전기적인 파츠와 기계적인 파츠가 결합되어 있는 릴레이를 전기기계식(electro-mechanical) 릴레이라 합니다. 이는 반도체로 만들어지는 solid state relay와 대조됩니다. 파워릴레이 (Power Relays) 파워릴레이는 모터와 같이 상대적으로 부하가 큰 장치들을 구동시키기 위...





댓글
댓글 쓰기