[산업자동화] 머신비전 - 트리거, 리셋, 스트로브
Trigger, Reset and Strobe
트리거 펄스 또는 프레임 트리거 펄스는 노출 제어를 포함하여 카메라를 제어하고 프레임 획득을 수행하도록 프레임 그래버에 지시하기 위해 외부 시스템에서 전송되는 전기 신호입니다. 이는 일반적으로 움직이는 객체의 비동기 캡처가 포함될 때 사용됩니다. 트리거 펄스는 관찰된 물체가 시야에 적절하게 위치할 때를 나타내는 위치 센서에 의해 발행됩니다.
재설정 펄스 또는 프레임 재설정 펄스는 영역 스캔 카메라에 프레임 획득 주기를 시작하도록 지시하기 위해 프레임 그래버에서 보내는 전기 신호입니다.
스트로브 펄스는 외부 조명 장치를 제어하기 위해 프레임 그래버에서 보내는 전기 신호입니다. 스트로브 펄스 타이밍은 영역 스캔 카메라의 프레임 타이밍에 적절하게 맞도록 제어됩니다.

다음 그림은 산업용 프레임 그래버가 담당하는 업무를 개념적으로 나타낸 것입니다. 이 그림은 가장 복잡한 경우를 다루고 있으며, 실제 응용 프로그램에는 일부만 포함되는 경우가 있습니다.

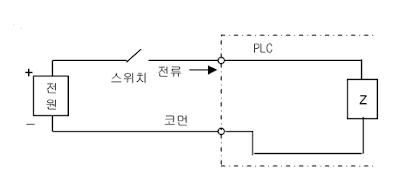
외부 시스템 신호로부터 장면을 캡처가 시작됩니다. 예를 들어 움직이는 물체가 특정에 위치에 도달하면, 센서 감지에 의해 캡처신호가 출력이 될 수 있습니다.
시스템은 트리거 펄스를 프레임 그래버로 보냅니다. 이에 대한 대응으로 프레임 그래버는 다음과 같은 임무를 수행합니다.
- 가능한 한 빨리 이미지를 캡처하도록 카메라에 적절하게 지시합니다.
- 카메라에서 생성된 이미지를 가져옵니다.
- 디지털 형식의 이미지를 프레임 그래버를 호스팅하는 컴퓨터 내부의 메모리 위치에 저장합니다.
외부 트리거에 대한 응답으로, 프레임 그래버는 비동기 리셋 명령을 카메라에 보내고 대기 단계로 들어갑니다. 동시에 카메라는 프레임 노출 상태로 들어갑니다.
마지막으로 프레임 그래버는 획득한 이미지에 다양한 데이터 조정 작업을 적용하고 주변 장치 버스를 통해 호스트 컴퓨터 메모리로 보냅니다.
아래 그림은 라인 스캔 카메라와 프레임 그래버의 인터페이스 다이어그램입니다.

프레임 그래버는 카메라의 라인 순서를 제어합니다. 이를 달성하기 위해 모션 인코더에서 보낸 연속 트리거 펄스의 반복 주파수에 비례하는 주파수로 레이트 컨버터를 거쳐 일련의 라인 리셋 펄스가 카메라에 전송됩니다.
외부 시스템은 움직이는 물체가 카메라 시야에 곧 도달하려고 한다고 판단합니다. 위치 검출기는 실제 카메라 시야보다 훨씬 앞에 위치할 수 있습니다. 이러한 이벤트를 프레임 그래버에 알리기 위해 페이지 트리거 펄스가 발행됩니다. 프레임 그래버는 페이지 지연이라는 프로그래밍 가능한 지연을 시작합니다. 이 페이지 지연은 스캔 라인 수로 표현될 수 있습니다. 페이지 지연이 끝나면 스캔할 개체가 카메라 시야에 들어옵니다. 페이지 지연은 프레임 그래버 내부의 대기 상태에 해당합니다. 대기 단계에 이어 획득 상태가 진행됩니다. 획득 상태가 되면 카메라의 비디오 페이지를 프레임 그래버로 가져옵니다.
페이지는 여러 개의 비디오 라인으로 구성됩니다. 각 라인에서는 카메라에서 프레임 그래버로 데이터 전송이 이루어집니다. 각 전송은 카메라의 판독 상태에 해당합니다.
모든 라인이 처리되면 완전한 페이지가 획득됩니다. 프레임 그래버는 획득한 이미지에 다양한 데이터 조정 작업을 적용하고 주변 장치 버스를 통해 호스트 컴퓨터 메모리로 보냅니다.
끝.
끝.






댓글
댓글 쓰기